Investigación de Autodesk trae Warp speed a CFD en NVIDIA GH200
Sources: https://developer.nvidia.com/blog/autodesk-research-brings-warp-speed-to-computational-fluid-dynamics-on-nvidia-gh200, https://developer.nvidia.com/blog/autodesk-research-brings-warp-speed-to-computational-fluid-dynamics-on-nvidia-gh200/, NVIDIA Dev Blog
TL;DR
- Autodesk Research desarrolló Accelerated Lattice Boltzmann (XLB), un solver CFD en Python nativo y de código abierto basado en el método Lattice Boltzmann (LBM), diseñado para integrarse con flujos de AI/ML.
- XLB corre con Warp de NVIDIA, un framework Python que compila kernels de GPU a código CUDA nativo. En pruebas, Warp permitió a XLB lograr aproximadamente ~8x de velocidad frente a su backend JAX en GPU A100 en configuraciones de hardware definidas.
- Una estrategia fuera de memoria (out-of-core), posible gracias al GH200 Grace Hopper Superchip y al NVLink-C2C (900 GB/s de ancho de banda CPU-GPU), permitió escalar a unas 50 mil millones de celdas de retículo en un clúster GH200 multi-nodo.
- El backend Warp de XLB demostró rendimiento comparable a un solver FluidX3D basado en OpenCL/C++ para un flujo de cavidad de lámina 512^3, ofreciendo al tiempo legibilidad en Python y prototipado rápido.
- Este trabajo marca un punto de inflexión: CFD nativo en Python puede competir con implementaciones de alto rendimiento y acelerar los flujos de trabajo CAE apoyados en IA.
Contexto y antecedentes
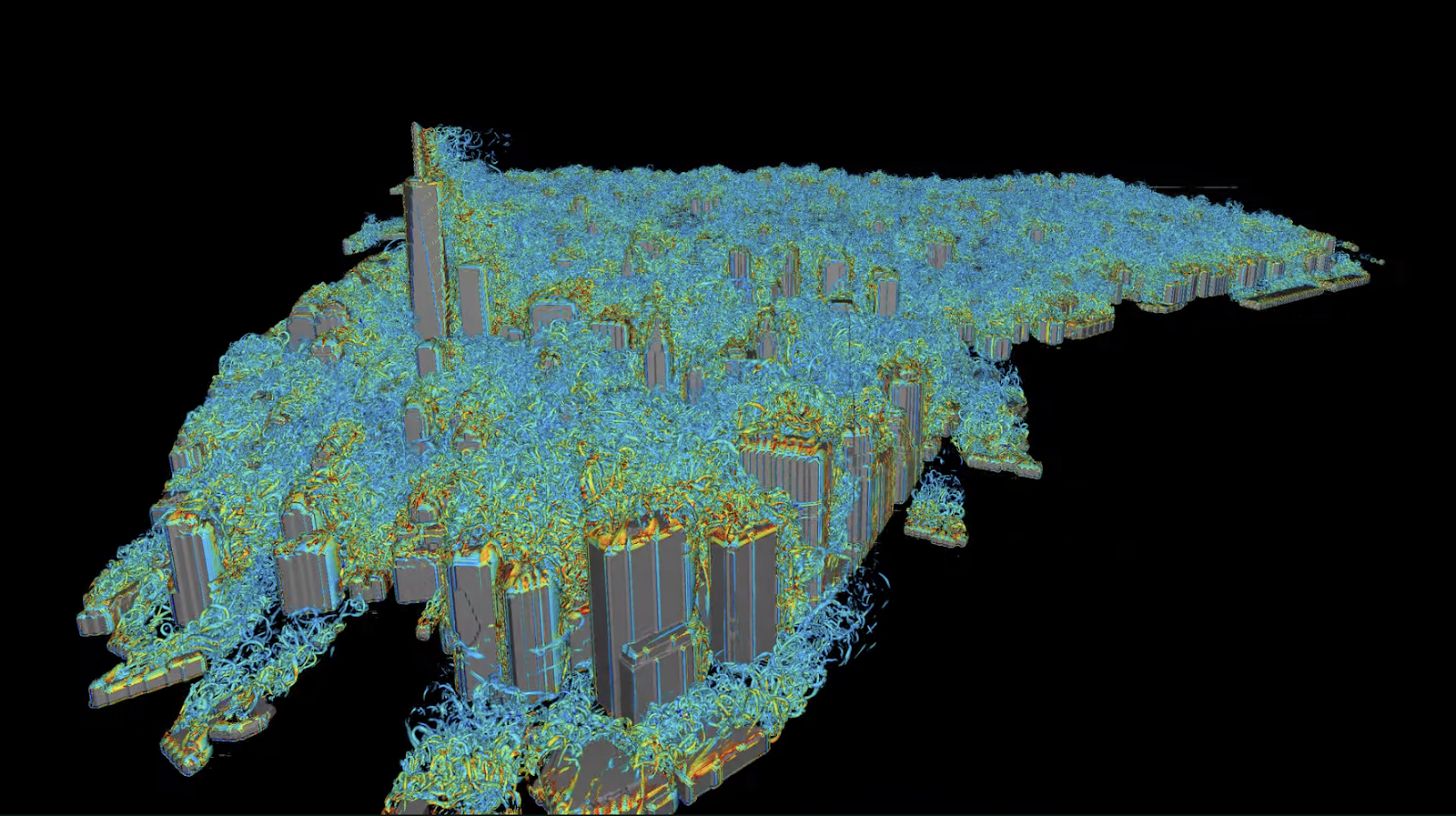
La Dinámica de Fluidos Computacional (CFD) está en el núcleo del desarrollo CAE moderno, desde diseñar aeronaves más seguras hasta optimizar sistemas de energía renovable. La velocidad y precisión de las simulaciones son determinantes para decisiones de ingeniería rápidas. Tradicionalmente, los solucionadores CAE han dependido de lenguajes de bajo nivel como C++ y Fortran para lograr throughput y escalabilidad, mientras que Python domina en IA/ML, pero no se utilizaba para CFD a gran escala por limitaciones de rendimiento. El auge del aprendizaje automático basado en física ha generado demanda de solucionadores CFD en Python que se integren con los ecosistemas de IA/ML sin sacrificar el rendimiento de lenguajes de bajo nivel. En respuesta, Autodesk Research desarrolló XLB, un solver CFD basado en LBM y de código abierto. Su implementación en Python facilita el acceso para desarrolladores y permite una integración diferenciable con marcos modernos de modelado IA-física. NVIDIA Warp es un marco de código abierto que permite escribir kernels de GPU directamente en Python, compilándose a CUDA en tiempo real. Warp ofrece características como warp.fem para análisis por elementos finitos y mantiene interoperabilidad con NumPy, CuPy y JAX. Los kernels de Warp son, por diseño, diferenciables, facilitando la integración con frameworks de aprendizaje profundo como PyTorch y JAX. El GH200 Grace Hopper Superchip aborda una necesidad clave de CAE: ejecutar simulaciones de alta fidelidad a máxima tasa y escala. La combinación de Warp con GH200 soporta flujos de trabajo en los que códigos CFD nativos en Python alcanzan rendimientos comparables a implementaciones tradicionales optimizadas, manteniendo la accesibilidad y el ciclo de desarrollo rápido del ecosistema Python.
Novedades
La colaboración entre Autodesk Research y NVIDIA muestra varios avances clave:
- CFD nativo en Python con XLB: XLB es un solver CFD en Python nativo, de código abierto, basado en LBM, diseñado para integrarse con flujos AI/ML.
- Rendimiento con Warp: Usando NVIDIA Warp, XLB logró aproximadamente 8x de velocidad en comparación con el backend JAX en una GPU A100 única en escenarios de referencia definidos.
- Estrategia out-of-core en GH200: Una estrategia fuera de memoria coloca el dominio y las variables de flujo principalmente en la memoria de la CPU y las transfiere a las GPUs según sea necesario. La interconexión NVLink-C2C del GH200, con 900 GB/s, facilita el streaming rápido de datos y transferencias coherentes de memoria, reduciendo cuellos de botella CPU-GPU.
- Escalabilidad multinodo: En pruebas conjuntas, el backend Warp de XLB escaló hasta una configuración multinodo capaz de simular hasta ~50 mil millones de celdas de retículo, con escalado casi lineal al aumentar el número de nodos. Un clúster de ocho nodos GH200 ejecutó simulaciones con aproximadamente 50 mil millones de celdas, logrando ~8x de velocidad frente a un sistema GH200 de nodo único.
- Rendimiento comparativo y eficiencia de memoria: En una comparativa con FluidX3D basado en OpenCL/C++, Warp/XLB ofreció un rendimiento comparable para un flujo de cavidad de 512^3, medido en MLUPS, con una mayor eficiencia de memoria (2–3x) en el mismo hardware. | Backend | Rendimiento (MLUPS) | Eficiencia de memoria (relativa) |---|---|---| | Warp (XLB) | ~8x más rápido que JAX en un GPU A100 | 2–3x mejor eficiencia de memoria |
Cómo Warp complementa a XLB
Warp proporciona un puente potente entre CUDA y Python, permitiendo a los desarrolladores escribir kernels de GPU en Python que se compilan a CUDA en tiempo real. Este modelo de programación explícita reduce la sobrecarga y facilita un rendimiento CFD más predecible. Warp mantiene interoperabilidad con NumPy, CuPy y JAX, permitiendo flujos de trabajo Python híbridos.
Benchmarking y consideraciones
El rendimiento observado de XLB con Warp se atribuye a un diseño de simulación optimizado y a una gestión explícita de la memoria. Warp exige que los desarrolladores preasignen entradas y salidas, reduciendo asignaciones ocultas y buffers intermedios, resultando en una huella de memoria más eficiente que escala de forma más predecible con el tamaño del problema. En la cavidad 512^3, Warp/XLB obtuvo rendimiento comparable al de FluidX3D OpenCL/C++, con la ventaja de la legibilidad y la rapidez de prototipado de Python.
Por qué importa (impacto para desarrolladores/empresas)
Para desarrolladores y empresas, la integración de Warp con XLB señala una nueva era de herramientas CFD en Python que pueden satisfacer las exigencias de rendimiento sin renunciar a la facilidad de uso de Python. Escribir kernels de GPU en Python, con compilación JIT a CUDA, facilita la experimentación de nuevos modelos físicos y pipelines IA-física, integrándose con flujos ML modernos. El contexto de hardware también es crucial: el GH200 Grace Hopper Superchip y la interconexión NVLink-C2C ofrecen un camino de alta velocidad para streaming entre CPU y GPU, posibilitando estrategias out-of-core para simulaciones a gran escala. Esta configuración apoya la capacidad de CFD nativo en Python para escalar a problemas de decenas de miles de millones de celdas sin sacrificar rendimiento.
Detalles técnicos o Implementación
- XLB es un solver CFD en Python nativo basado en el LBM y es de código abierto.
- Warp permite escribir kernels de GPU en Python, que se compilan a CUDA en tiempo real.
- Interoperabilidad con NumPy, CuPy y JAX.
- Rendimiento: ~8x de velocidad frente a JAX en una A100, y 2–3x mejor eficiencia de memoria.
- Estrategia out-of-core e interconexión: NVLink-C2C de 900 GB/s, streaming de datos entre CPU y GPU para grandes simulaciones.
- Escalado: hasta ~50 mil millones de celdas en un clúster de 8 nodos GH200 con escalado cercano a la linearidad.
- Benchmark: cavidad 512^3 comparado con OpenCL/OpenC++ (FluidX3D), rendimiento similar y mayor legibilidad.
Beneficios clave
- Camino Python->CUDA directo para kernels, rendimiento predecible en CFD.
- Simulaciones diferenciables para integrations con IA.
- Interoperabilidad con NumPy, CuPy y JAX.
- Gestión de memoria explícita para escalabilidad.
Conclusiones clave
- XLB demuestra que CFD nativo en Python, acelerado con Warp en GH200, puede competir con implementaciones de alto rendimiento en bajo nivel sin sacrificar la accesibilidad.
- Kernels Python compilados a CUDA, estrategias out-of-core y escalabilidad multinodo abren la CFD Python-nativo para problemas masivos.
- La colaboración habilita flujos de trabajo CFD compatibles con IA, integrando herramientas Python con capacidades CFD de alto rendimiento.
- Los resultados de prueba muestran mejoras sustanciales de velocidad y eficiencia de memoria frente a backend JAX, manteniendo la legibilidad de Python.
- Este esfuerzo resalta la creciente adopción de herramientas CAE nativas en Python para investigación y desarrollo impulsados por IA.
FAQ
-
¿Qué es XLB?
Es un solver CFD Accelerated Lattice Boltzmann, en Python y de código abierto.
-
¿Cómo mejora Warp el rendimiento de CFD?
Warp permite kernels de GPU escritos en Python y compilación JIT a CUDA, reduciendo la sobrecarga y permitiendo un rendimiento más predecible.
-
¿Qué hardware se utilizó para las pruebas?
GH200 Grace Hopper y GPU A100 con NVLink-C2C (900 GB/s).
-
¿XLB es de código abierto?
Sí, es descrito como un solver CFD de código abierto.
-
¿Qué impacto tiene para flujos CAE?
Permite desarrollo CFD en Python que se integra con ecosistemas IA/ML, manteniendo alto rendimiento y escalabilidad.
Referencias
- NVIDIA Dev Blog: Autodesk Research Brings Warp Speed to Computational Fluid Dynamics on NVIDIA GH200. https://developer.nvidia.com/blog/autodesk-research-brings-warp-speed-to-computational-fluid-dynamics-on-nvidia-gh200/
More news

NVIDIA HGX B200 reduce la intensidad de las emisiones de carbono incorporado
El HGX B200 de NVIDIA reduce la intensidad de carbono incorporado en un 24% frente al HGX H100, al tiempo que ofrece mayor rendimiento de IA y eficiencia energética. Este artículo resume los datos PCF y las novedades de hardware.
Shadow Leak muestra cómo los agentes de ChatGPT pueden exfiltrar datos de Gmail mediante inyección de prompts
Investigadores de seguridad demostraron un ataque de inyección de prompts llamado Shadow Leak, que utilizó Deep Research de ChatGPT para exfiltrar datos de una bandeja de Gmail. OpenAI parcheó la falla; el caso subraya los riesgos de la IA con agentes.

Predecir Eventos Climáticos Extremos en Minutos sin Supercomputadora: Huge Ensembles (HENS)
NVIDIA y Berkeley Lab presentan Huge Ensembles (HENS), una herramienta de IA de código abierto que pronostica eventos climáticos raros y de alto impacto usando 27,000 años de datos, con opciones de código abierto o listas para usar.

Cómo reducir cuellos de botella KV Cache con NVIDIA Dynamo
NVIDIA Dynamo offloads KV Cache desde la memoria de la GPU hacia almacenamiento económico, habilitando contextos más largos, mayor concurrencia y costos de inferencia más bajos para grandes modelos y cargas de IA generativa.

Microsoft transforma el sitio de Foxconn en el data center Fairwater AI, descrito como el más poderoso del mundo
Microsoft anuncia planes para un data center Fairwater AI de 1,2 millones de pies cuadrados en Wisconsin, con cientos de miles de GPU Nvidia GB200. El proyecto de 3.3 mil millones de dólares promete un entrenamiento de IA sin precedentes.

Manual de los Grandmasters de Kaggle: 7 Técnicas de Modelado para Datos Tabulares
Un análisis detallado de siete técnicas probadas por los Grandmasters de Kaggle para resolver rápidamente conjuntos de datos tabulares mediante aceleración por GPU, desde baselines variados hasta ensamblaje y pseudo-etiquetado.